.png)

首秀Optimus,人类科学家对人形机器人的研发走过了半个世纪。当前全球人形机器人行业内的优势企业包括波士顿动力、索尼、本田、SoftBank Robotics、Agility等,总体上来看,全球人形机器人研究主要集中于以欧美、日本和中国为代表的地区。 工信部近日印发《人形机器人创新发展指导意见》(以下简称《指导意见》),计划到2025年,初步建立人形机器人创新体系;2027年,总实力达到世界领先水平,成为重要的经济稳步的增长新引擎。《指导意见》一经发布立即受到各界关注,并引发关于人形机器人的热议。 我国人形机器人研究始于20世纪90年代,在国家“863”计划、国家自然科学基金,以及其他部门及地方的资助下,国防大学、清华大学、北京理工大学、浙江大学、中国科学院自动化所等多家单位取得了丰硕的研究成果,培养了大量科研团队与技术人员。今年8月世界机器人大会和前不久1024人形机器人高调亮相。今天小编将对国内专注于人形机器人研发和生产的团队及公司一一介绍,请大家往下浏览。
国防科技大学早在1987年就开始了步行机器人系统与技术领域的研究工作,是国内首个开展双足步行机器人研究的高校。1990年,其公布的双足步行机器人样机能实现0.36km/h的静态行走。1999年,发布了中国第一台可以在一定程度上完成静态和动态行走的类人型双足机器人“先行者”。2003年,公布了Blackman步行机器人,最大动态走路的速度可达1.08km/h。2010年,在国家“863”计划支持下,研制了步行机器人Blackman-Ⅱ,实现了仿人双足机器人自主打乒乓球。2011年,成功开发了步行机器人Blackman-Ⅲ。2021年,研究了液压驱动双足机器人的轨迹规划和运动控制技术,机器人最大前进速度达到2.5m/s。
哈尔滨工业大学机器人研究所有多名院士和众多杰出领军科研人才,其人形机器人系统HIT WLR样机系统已完成多次迭代,采用轮腿复合方式,以液压驱动为主,重80kg,高1.7m,具有轮式快速移动特点,最高速度超过15km/h,腿式跳跃过障0.5m,并具备通过斜坡、起伏地形和搬运能力,具有自主定位、建模和导航功能。此外,还研制了类Atlas的液压驱动双足机器人HIT Humanoid,重量60kg,身高1.6m,拥有21个自由度,目前该机器人已完成样机的研制。今年8月,博实股份与哈工大签订《战略合作框架协议》,共同设立人形机器人关键技术及原理样机产业化研发项目,并在未来共同推进有关技术成果和产品的产业化。


今年世界机器人大会北京理工大学推出了“汇童6”仿人机器人, “汇童6”身高165cm,体重为55kg,全身拥有26个自由度,可完成走、跑、跳等一系列精细动作,奔跑速度可达7km/h,跳跃高度为0.5m,双足原地跳跃距离可达1m,能够自主攀登20cm高度的楼梯,自主跨越30cm高度障碍。 北理工团队早在2001年就开始了第一台人形机器人的研发,成功研制了7代人形机器人。2002年,研制出了国内第一个无缆行走机器人,能进行太极拳、刀术表演;2010年,机器人实现了乒乓球对打;2016年起,机器人实现了摔、滚、走、爬、跳、攀等多模态运动能力,实现了具有国际首创的摔倒保护、翻滚、行走、爬行等多模态运动及转换。目前,已实现6km/h的跑步速度,跳高0.5m,前跳1m,实现了前滚翻、站立摔倒,并重新站起等功能,在机器人运动、作业、视觉识别、智能决策等关键技术方面,均取得重要进展,正朝着更高的技术指标和实际应用方向迈进。
浙大机器人团队在世界机器人大会现场推出第四代仿人机器人悟空,新款悟空通过融合腿足运动技术和环境感知技术,实现了机器人的三维环境地图构建和自主动态导航。可以行走过包括楼梯,草地,可以过钢管障碍物,25°斜坡等等一系列复杂地形。目前的行走状态最高速度为6km/h。此外,目前能轻松实现最大0.5m的跳跃高度。

据悉,浙江大学自2006年起开始研制人形机器人,突破了自适应精确建模、动态平衡控制、全身协调控制、智能感知决策等核心技术,先后完成四代“悟空”系列人形机器人系统研制。一代“悟空”人形机器人突破了手足眼融合技术,实现了人-机、机-机对打乒乓球,在国际上形成了较大影响。四代“悟空”人形机器人最快运动速度超过6km/h,跳高0.5m,可上下25度斜坡和10cm台阶,可适应室外路面、草丛、泥地等多种地形。在钢管路面和外部推力干扰等未知扰动下,可迅速恢复平衡并保持稳定行走。通过融合腿足运动技术与环境感知技术,实现了机器人的三维环境地图构建和自主动态导航。
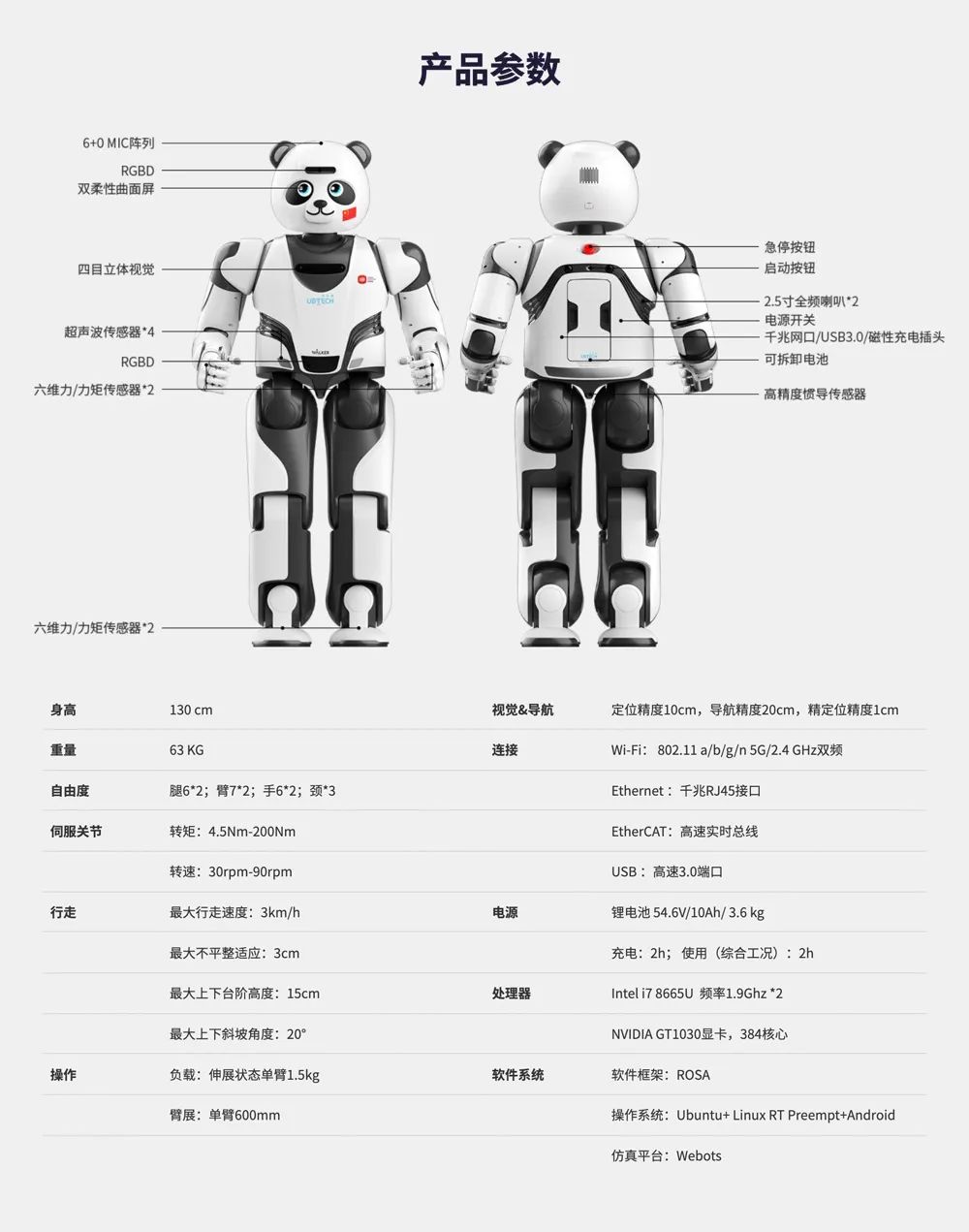
优必选自2016年开始研发大型人形机器人以来,经过多代工程迭代,第一代双足机器人Walker在CES 2018上亮相,并引起行业广泛关注。今年熊猫机器人优悠和Walker X 亮相成都大运会闭幕式,其中熊猫机器人优悠曾在迪拜世博会中国馆服务6个月。Walker X身高130cm,重63kg,全身具备41个高性能伺服关节构成的灵巧四肢、多目立体视觉和全向听觉等感知系统,走路的速度最快可达3km/h,还可以在20度斜坡行走,实现“坡度实时自适应”。熊猫机器人优悠基于Walker X,以大熊猫的形象为设计原型量身定制。
优必选先后推出人形机器人的核心伺服舵机、消费级人形机器人Alpha系列、STEM教育智能编程机器人Jimu和智能云平台商用服务机器人Cruzr等多款产品。优必选股东中不乏知名机构,如腾讯、启明创明、工商银行、鼎晖投资、科大讯飞、泰国正大、海尔、澳洲电信、居然之家、民生证券、中信金石、民银国际、中广核、松禾资本等,优必选正在冲刺港股IPO。倘若顺利上市,优必选将成为“人形机器人第一股”。
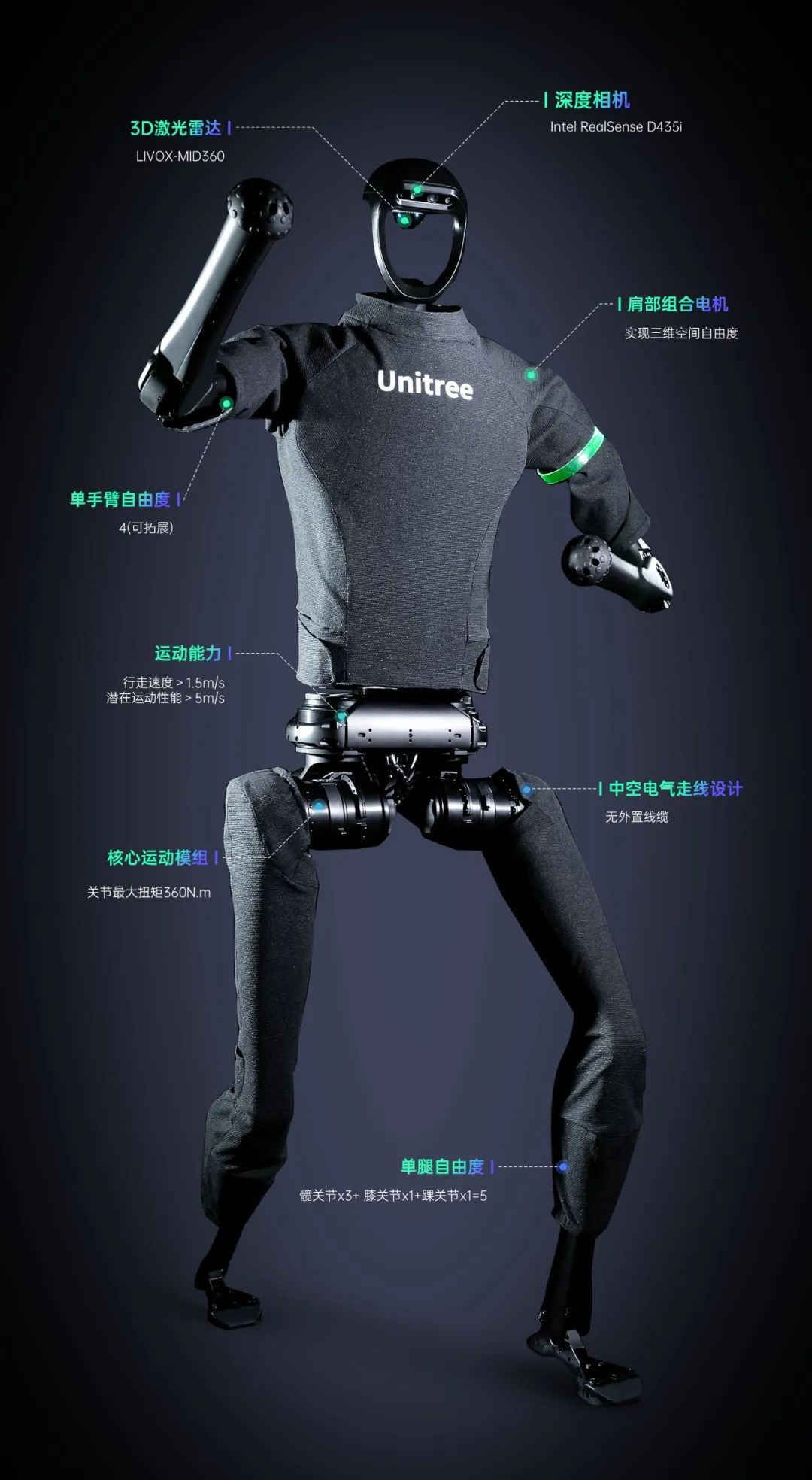
2023年8月宇树科技发布了旗下首款人形机器人H1,该机器人身高约180cm,重约47kg,配备有3D激光雷达和深度相机,具有360°全景深度感知,走路的速度约1.5m/s。
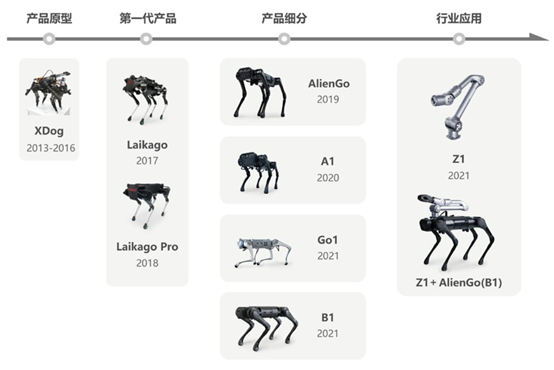
宇树科技成立于2016年8月,创始人王兴兴,公司坐标浙江杭州,是研发、生产和销售消费级、行业级高性能四足机器人、灵巧六轴机械臂和人形机器人的新锐创企。目前公司已推出Laiakgo、Aliengo、A1、Go1、B1、H1等多款四足机器人产品,累积销量数千台,遍布数十个国家。宇树科技曾受邀参加2021牛年央视春晚、2022冬奥会开幕式、2023 Super Bowl(美国春晚)赛前表演、2023杭州亚运会和亚残运会等。
今年1024科技日上,小鹏汽车创始人何小鹏公布了全新自研双足机器人PX5。PX5身高150cm,具备超轻量级类人手臂,采用驱控一体设计,单臂具备7自由度。PX5拥有仿人灵巧手,单手有11个自由度,双指保持力1kg,采用刚柔混合驱动方案,提供对不一样的形状物体的抓取包覆姿态,可实现精准倒水、拿小物品、抽纸巾、与人握手等行为。据介绍,PX5拥有双足行走和跨越障碍能力,可在室内外大步行走、敏捷运动、抗扰越障。发布会上,何小鹏介绍PX5可以握螺丝刀、提箱子、捏圆珠笔、端杯倒水、骑平衡车等等。
小鹏汽车成立于2014年,总部在广州,是以智能驾驶为核心竞争力的新能源汽车公司,由何小鹏、夏珩、何涛等人发起,随着人形机器人兴起,小鹏汽车积极投入研发,将人形机器人作为未来发展的重要战略之一。小鹏曾与生态链企业鹏行智能联合推出四足机器马。
达闼科技过往一直专注于轮式人形机器人。在2023世界机器人大会上第一次展出了双足机器人XR-4(又名七仙女)。七仙女拥有60多个智能柔性关节,在业界处于领先水平;采用并联驱动结构和高扭矩密度电机,峰值扭矩高达600N·m,通过多模态大模型RobotGPT赋能,实现高性能的具身智能。七仙女将在2025年实现量产。
达闼科技2015年由曾任中国移动研究院院长黄晓庆创立,公司位于北京望京。达闼科学技术创新性地提出 “云端机器人”(“云脑+安全网+机器人”)架构并成功实现云端机器人的商业化。此外,达闼开创性的研发了集通信、计算、传感于一体的机器人智能柔性关节SCA,解决了机器人硬件在标准化、集成化及产业化方面的局限,降低了机器人准入门槛、加速产业生态形成。
今年世界机器人大会上,追觅科技展示了人形机器人,该机器人能够在支架支撑下直立行走,并能够在现场为观众制作咖啡。追觅通用人形机器人实现了高度仿生,身高178cm,体重56kg,全身共44个自由度,其中单腿6个自由度,能够实现单腿站立。交互方面,配备了深度相机,能够实现室内三维环境的建模,结合先进步态控制算法+多种传感器,能适应不同路面,实现自主避障。
追觅科技成立于2017年,同年年底加入小米生态链,负责智能清洁类目。公司总部在苏州,公司前身是创始人俞浩在清华大学创建的 “天空工场”。“飞机与梦”,是俞浩从小的向往,但长大以后,他慢慢想到自己的梦想与其说是“造飞机”,不如说是用科技不断探索极限。
2021年,追觅科技曾成功完成一轮36亿C轮融资,创下了智能硬件行业最大单笔融资纪录。2021年后,追觅科技就开始布局广义机器人生态,先后推出了仿生四足机器狗、通用人形机器人、商用送餐机器人、泳池清洁机器人等智能服务机器人产品。

北京钢铁侠科技有限公司成立于2015年,国内较早从事双足大仿人机器人研发及推广的科技公司。创始人张锐来自北京联合大学自动化专业,先后在北航无人机所、中科院自动化所、中国航天院五院工作,参与过无人机、机器人、航空航天等多个领域研发工作。
在团队成立之初,钢铁侠科技两年研发了三代人形机器人,快速完成了产品体系搭建,在人形机器人控制器操作系统通信网络等关键技术上也进行了自研和技术突破,并参与了诸如宇航员人形机器人等多个国家级项目。
2018年小米成立了小米机器人实验室,提前布局进入智能机器人市场。2022年8月推出人形机器人CyberOne。

小米科技以智能手机智能家居产品而闻名于世,是全球领先的智能制造公司之一。人形机器人CyberOne以AI为内核,以标准人形为载体,是小米对未来科技生态的一次探索,也是小米多元融合技术体系的新成果。
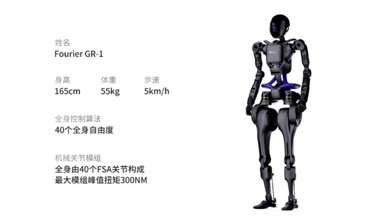
傅利叶智能通用人形机器人gr-1于今年7月正式对外发布。这款机器人有高度仿生的躯干构型、拟人的运动控制,具备快速行走、敏捷避障、稳健上下坡、抗冲击干扰等运动功能,结合认知智能,能够与人协同完成动作,在工业、康复、居家、科研等多应用场景潜能巨大。

傅利叶智能2015年在上海成立,傅利叶智能是国内康复机器人独角兽企业。旗下康复机器人可以有明显效果地地辅助康复治疗师们,节约人力成本,让治疗师们将主要精力放在对不同病情的病人进行个性化治疗方案的设计上。公司创始人顾捷曾表示,做人形机器人是2003年在上海交通大学求学时便开始的梦想,但他并没有盲目开始,而是从医疗康复领域外骨骼机器人一步一个脚印走起。

2023年08月04日清华大学交叉信息研究院助理教授陈建宇在北京创立了星动纪元。公司专注于研发具身智能和人形通用机器人技术,认为“具身智能”是人工智能的下一个浪潮,人形机器人成为其重要载体。
星动纪元是一家学术派创业团队,由图灵奖得主、中科院院士、清华大学交叉信息研究院院长姚期智院士团队孵化。因而,星动纪元不少技术都是由清华大学交叉信息学院的技术成果转化而来,公司展出了人形机器人大小两款“小星”。
前华为“天才少年”、B站知名科技UP主稚晖君(线月在上海创立了智元机器人。智元机器人致力于以AI和机器人的深层次地融合,长期投入打造存在竞争力的机器人产品和生态。
8月,公司推出了第一款完整人类造型的人形双足机器人——远征A1,身高175cm,重53kg,最高步速达7km/h,全身有49个自由度,可以承重80kg,单臂最大负载5kg。
稚晖君在发布会上也提到,现在有很多行业巨头的机器人已能飞檐走壁,在不久的将来,对于远征A1来说,跳舞、跑酷也都不是难题,最关键的是,他们会将其成本控制在20万元以内,真正具备落地商用的可能。
逐际动力由南方科技大学长聘教授张巍博士于2022年在深圳创立。逐际动力是在南方科技大学产学研背景下孵化出来的通用足式机器人公司,创始人张巍研究人形机器人多年。2021年,他与俄亥俄州立大学团队在美国率先用强化学习的方法,完成了人形双足机器人室内外的稳定行走。逐际动力成立后,更进一步,通过模型驱动和AI混合的方式来推动双足机器人的研发。
今年10月17日,逐际动力完成天使轮和Pre-A轮融资,总金额近2亿元。本轮融资将为逐际动力从产品落地到前沿技术预研带来资金和产业支持,涵盖四轮足机器人的产品化、人形双足机器人的研发、AI与具身智能核心技术的攻关。11月,前无人驾驶高管张力和顶级AI科学家潘佳博士加盟逐际动力,加速通用足式机器人商业化落地和具身智能技术攻关。
2023年1月19日,纯米科技的官方公布了纯米「全尺寸人形仿生机器人」的荧幕首秀视频,视频中近距离展示了机器人的全部细节,根据团队核心研发人员介绍,纯米这台机器人的内部代号为“大强”,全身共有35台伺服电机,机身高度灵活,五根手指均能够达到仿生级别的弯曲动作,成熟度甚至超过小米的CyberOne。

纯米科技由杨华2013年5月在上海创立,2014年加入小米生态链。纯米科技依托互联网厨电,打造面向未来烹饪定制化时代的科技厨房生态体系。团队总人数超500人,大部分来自苹果、MOTO、IBM、飞利浦、三洋等世界500强科技技术企业。
熵洛智能由陈康剑于2015年在上海创立,团队以同济大学为核心,公司主营研发ROS机器人套件、协作机械臂、人形机器人、仿生机器人、灵巧手等产品。
EX机器人关键技术涉及仿真皮肤、机械结构、柔性机器人关节、运动控制等,比如机器人操作系统控制了机器人全身140多个电机使之动作灵活精准,仿真皮肤与机械结构结合让机器人能做出眨眼、皱眉等各种人类细微表情。除了仿真的皮肤以外,EX机器人集团利用多模态融合技术和专属的中文语料GPT模型,让这些仿生人形机器人具备可听、可看、可说、可答、可思考的能力,同时拥有超高的自由度,可以灵活抓取物品,模仿人类多种动作与表情。
大连帝艾斯由李博阳于2013年7月创立,新三板挂牌上市,公司专门干智能仿生人形机器人研发、生产、销售及服务,旗下EX机器人产品创新与研发技术团队由来自日本早稻田大学、北九州大学的归国专家组成。
五八智能科技(杭州)有限公司于2022年02月成立,专门干仿生智能前沿技术开发及成果产业化,由中国兵器装备集团自动化研究所有限公司与中国兵器装备集团杭州智元研究院有限公司联合成立,是中国兵器装备集团智能创新研究院仿生智能控制研究所实体运营单位。
“大圣”的总体设计理念源于地球上奔跑速度最快的双足动物——鸵鸟,其身高1.15m,重约30kg,走路的速度可达4.5km/h。“大圣”凭借其仿拟鸵鸟的生理构造和运动方式,具备草地、砂石等复杂地形环境的适应能力和超过2个小时的行走续航时间。“大圣”的行进间动态抗冲击能力突出,动态抗扰动冲量质量比达到0.4 Ns/kg,为国内领先水平。
第六届上海进博会上,中兵智能创新研究院伏羲人形机器人亮相,为来访嘉宾进行展区讲解,该机器人采用了具身智能技术路线,具有强大的学习能力及广阔的应用场景。
中兵智能创新研究院有限公司成立于2022年01月,包含智能系统总体技术部、智能集群技术部、无人平台技术部、仿生机器人技术部等部门。
第八届中国机器人峰会和亚运会期间,之江实验室携仿人钢琴演奏机器人、高性能人形机器人、深海机器人、一体化关节、智能低空载人飞行器等多款产品亮相。
之江实验室成立于2017年9月,坐落于杭州城西科创大走廊核心地带,实验室由浙江省人民政府主导举办、浙江大学等院校支撑的新型研发机构,是浙江深入实施创新驱动发展的策略、探索新型制浙江路径的重大科学技术创新平台。目前,中国工程院院士王坚担任实验室主任。智能机器人研究中心是之江实验室最早成立的研究中心之一。
上海理工大学李清都教授团队研发的人形机器人小贝4.0,身高130cm,重量仅为35kg。据了解,小贝的行走能耗很低,并且大多双足机器人都是弯腿行走,小贝能轻松实现自然步态行走,通过轻量化结构设计与惯性驱动技术,实现不到100W的行走能耗,目前在全球领域处于能耗最低。
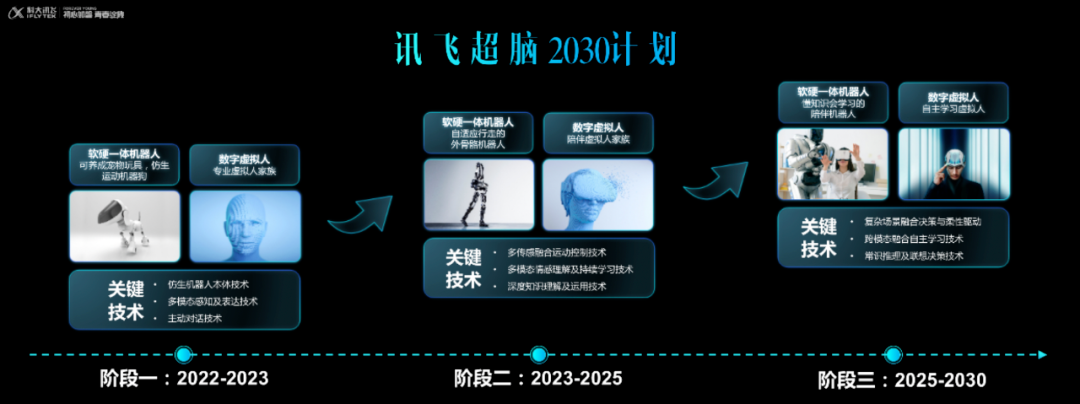
今年1024开发者节上,科大讯飞对外正式公布人形机器人,大模型+具身智能人形机器人。星火大模型将让讯飞AIBOT赋能机器人发展新阶段,人形机器人对复杂任务的拆解、开放场景的物体寻找显著提升,在强化学习泛化抓取、仿人行走的复杂地形运动能力上都有一个非常大的提升。据悉未来讯飞将以人形机器人为牵引,来推动‘视觉-语言-动作’多模态具身大模型,更好的助力机器人脑力升级。
近日,人形机器人新军“加速进化”完成了数千万元天使轮融资,本轮资金将大多数都用在产品研制量产及团队搭建等方面。企业成立于2023年,致力于研发更富有行动能力的人形机器人本体和易于开发的运控开发平台。公司创始人程昊曾是字节系高管,同时具有大规模产研团队管理和复杂业务商业化的经验,师从清华大学人形机器人专家赵明国教授。
加速进化早期将着重关注开发者领域,为AI企业、科研院所提供人形机器人,快速实现标品量产供货。
巨大的市场空间,行业前景如星辰大海,人形机器人将迎来巨大机遇。人形机器人反映了当今世界智能装备的最高技术水平。据国际投资银行高盛预测,到2035年,人形机器人市场规模有望达到1540亿美元。但整体看来,人形机器人还处于产业高质量发展培育期,亟须加强顶层设计、凝聚产业共识、明确发展方向,加大算法、算力、数据的开源力度,做好人形机器人产业链布局、配套建设,才能共同构建产业发展良好生态。
文章出处:【微信号:robotmagazine,微信公众号:机器人技术与应用】欢迎添加关注!文章转载请注明出处。
供应链优质企业 /
上海2024年4月4日 /美通社/ -- 4月2日,以人机共融•智造未来为主题的首届
生态大会在上海举办,吸引了来自200余家公司的500多位参会人员,特别邀请了多位国内知名院士
生态大会 分享跨越边界的探索之路 /
生态大会(CHREC 2024)将于4月2日(周二)在上海·智能谷产业园举办,银牛微电子受邀参加并发表主题演讲。
生态大会 /
在历史的长河中,技术革新总是一个不断推动人类社会向前发展的动力源泉。近日,
企业,于2023年12月29日正式在香港联合交易所挂牌上市。这一里程碑式的成就,不仅彰显了其卓越的
里最复杂的一类,尤其要实现“具身智能”这一目标。继科大讯飞、小鹏汽车、傅利叶智能、智元
与制造商优必选科技于2023年12月29日顺利登陆香港联合交易所(以下简称港交所),以卓越的
“夸父”通过OpenHarmony 3.2 Release版本兼容性测评
深圳开鸿数字产业发展有限公司(以下简称”深开鸿“)OpenHarmony生态建设能力和在新兴行业领域的技术创新实力,也标志着OpenHarmony在新兴行业领域又向前迈进了
高集成和高动态的发展阶段,国际范围内众多科技公司在这一阶段做出尝试。其中,日本和美国是技术专利布局较早的国家。
下游应用领域广泛,所涵盖的公司极多,通过一系列分析中游公司的客户情况,前瞻认为医疗康复、物流、汽车制造是
行业龙头公司全方位对比 /
狗CyberDog2出现在小米发布会上;前华为“天才少年”稚晖君的智元
协作机器人开发商Collaborative Robotics官宣完成1亿美元B轮融资
采用144核,能效提升66%!英特尔至强6处理器震撼上市,加速数据中心升级
基于Arm Cortex-CM85内核的RA8D1作为控制器 通过MIPI DSI实现LVGL显示
重磅!英特尔发布intel3制程至强6能效核处理器,赋能数据中心能效升级
TMS320UC5409-80,pdf(Fixed-Point Digital Signal Processor)
I.MX6ULL-飞凌 ElfBoard ELF1板卡 - 如何在Ubuntu中编译OpenCV库(X86架构)
嵌入式学习-飞凌ElfBoard ELF 1板卡 - 如何在Ubuntu中编译OpenCV库
无刷电机用的单电阻采样的FOC,拿天线贴着电机线或者贴近采样芯片,电机就会停转