.png)

哈工大机电学院谢晖教授团队研制出仿藤蔓成长接连体机器人 助力腔内介入手术精准安全
2024-10-24 10:29:05新闻中心
被迫适应毫米级软接连体机器人已在腔镜手术中大规模的使用。但是,机器人介入过程中的被迫变形根据其与管腔之间的交互作用,存在潜在的安排压榨或刺穿危险。此外,在杂乱或敞开解剖结构中,其导航和操作能力受限。由此,急需开发可以自主适应环境的毫米级软接连体机器人。
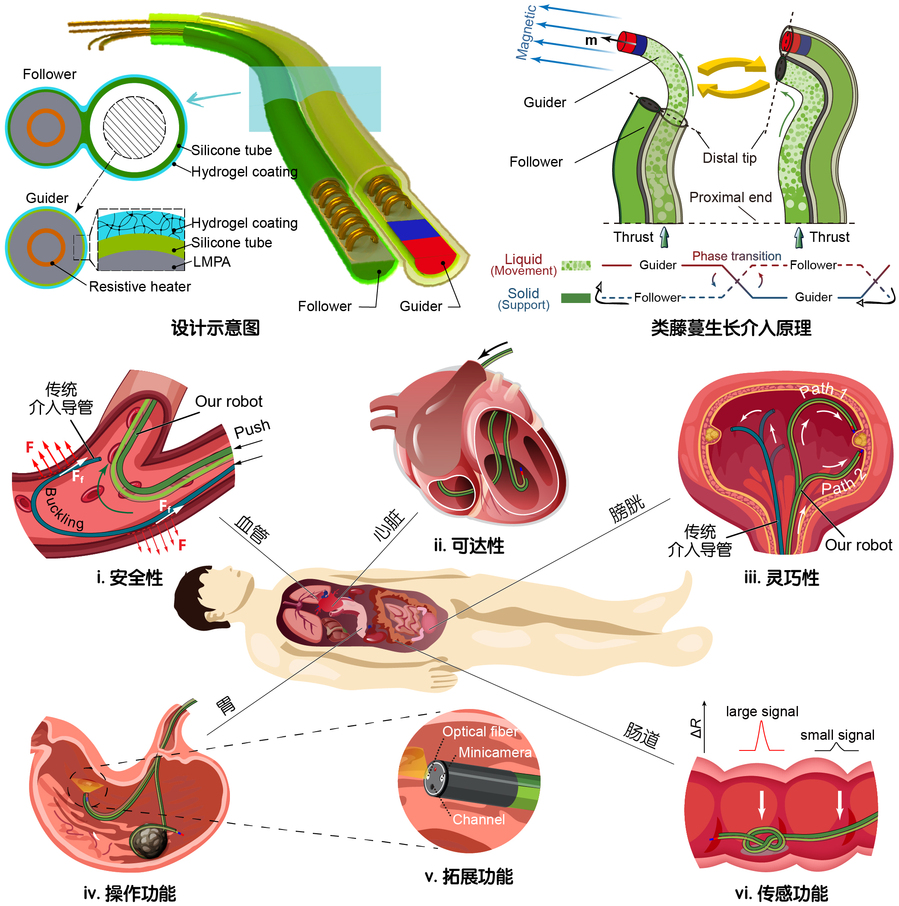
针对以上问题,团队成功研制出直径为毫米级的接连体机器人,其能像藤蔓成长相同介入腔室,可防止对管腔的揉捏,极大降低了手术危险。该机器人由两个变刚度相变中心组件构成,在可编程外磁场的准确引导下替换相变,可完成不依赖于环境的自主塑形和安全介入,在猪活体试验中成功完成了胃、心脏的介入手术试验,将为经腔机器人手术供给新的处理途径。
机器人技能与体系全国重点试验室为论文仅有单位。机电学院谢晖教授、孟吉祥教师、张号副教授为论文一起通讯作者。机电学院博士生毛立阳、杨鹏、田陈堯为论文一起榜首作者。机电学院博士生沈行健、硕士生王飞皓为论文一起作者。生命科学和医学学部胡颖教授、王星文副研究员为相关研究工作供给大力支撑。
哈尔滨工业大学全媒体中心编审 技能上的支撑:哈尔滨工业大学网络安全和信息化办公室